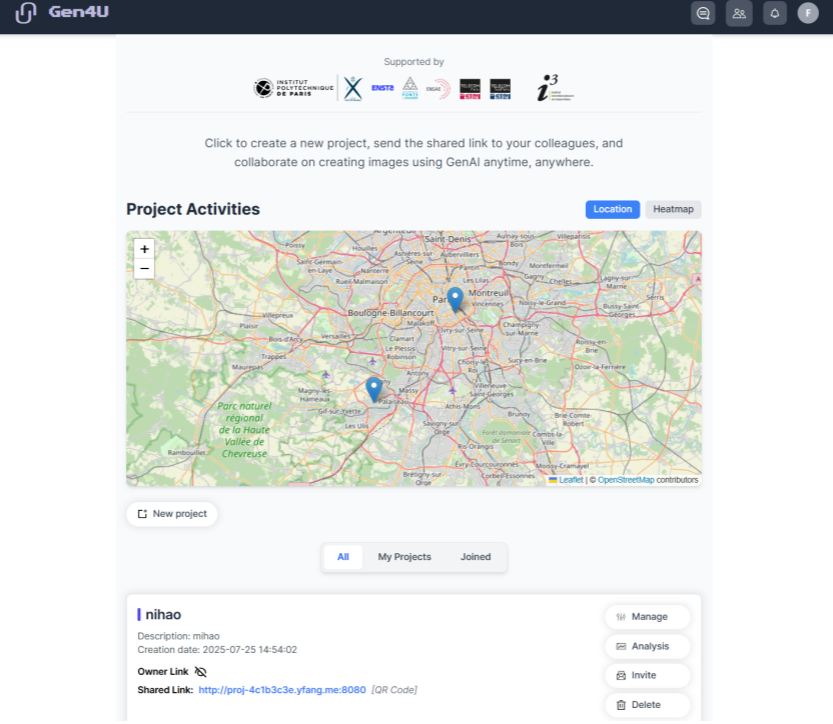
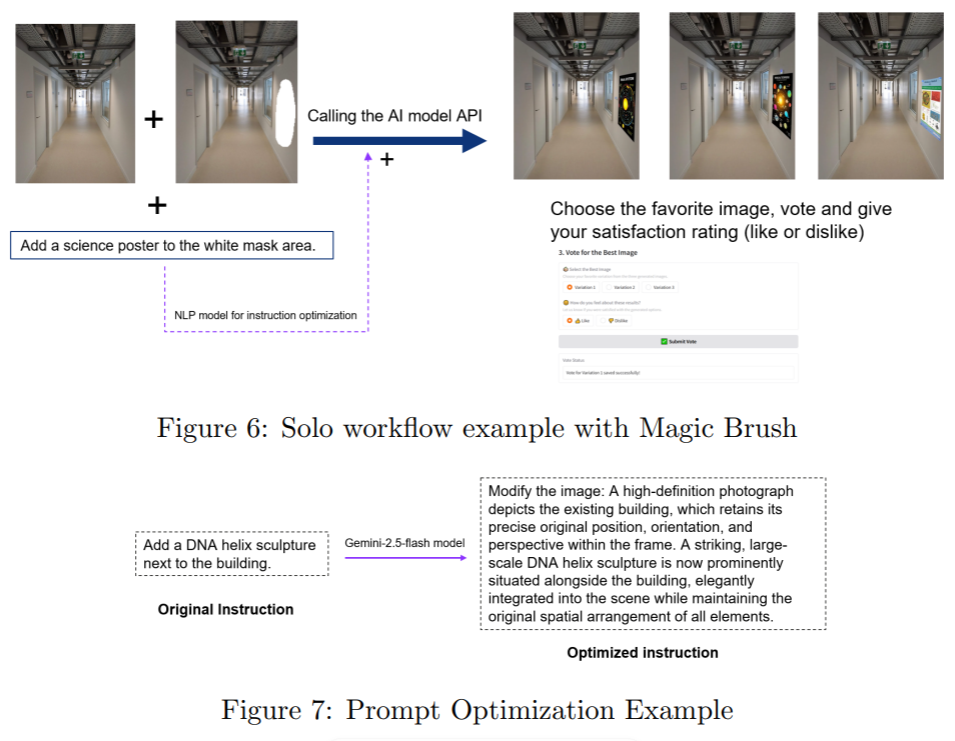
Gen4U: AI-Powered Collaborative Image Generation Platform
✨ Key Features:
- Dual-workflow interface for individual and group work
- AI-powered prompt fusion using LLM
- Persistent, isolated project workspaces for asynchronous collaboration
- Integrated analytics and task-assignment modules
- Visual data analysis system for user insights
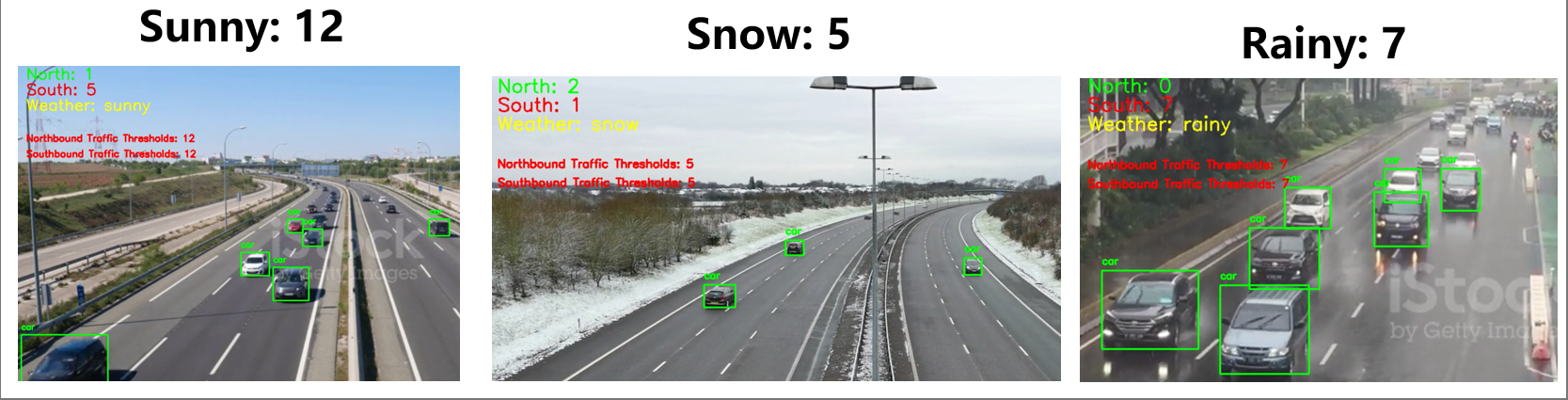
Deep Learning–Based Automated Traffic Monitoring and Planning System
🎯 Highlight: The project uses YOLOv5 for real-time vehicle type detection and counting in north and south directions. It includes a GUI for manually setting vehicle flow thresholds per direction, issuing warnings when exceeded, and automatically adjusting thresholds based on weather using ResNet50 model (sunny > rainy > snowy).
Computer Vision-based Foot-Ground Contact Detection for Long Jump
🎯 Highlight: The project proposes a hybrid Vision Transformer (ViT) and Bidirectional LSTM (BiLSTM) model with an attention-based fusion mechanism to accurately classify the degree of foot-ground contact during the long jump. 91.87% accuracy (+9% over baseline) with 8.18 ms/frame real-time inference under low-resource, low-frame-rate settings.

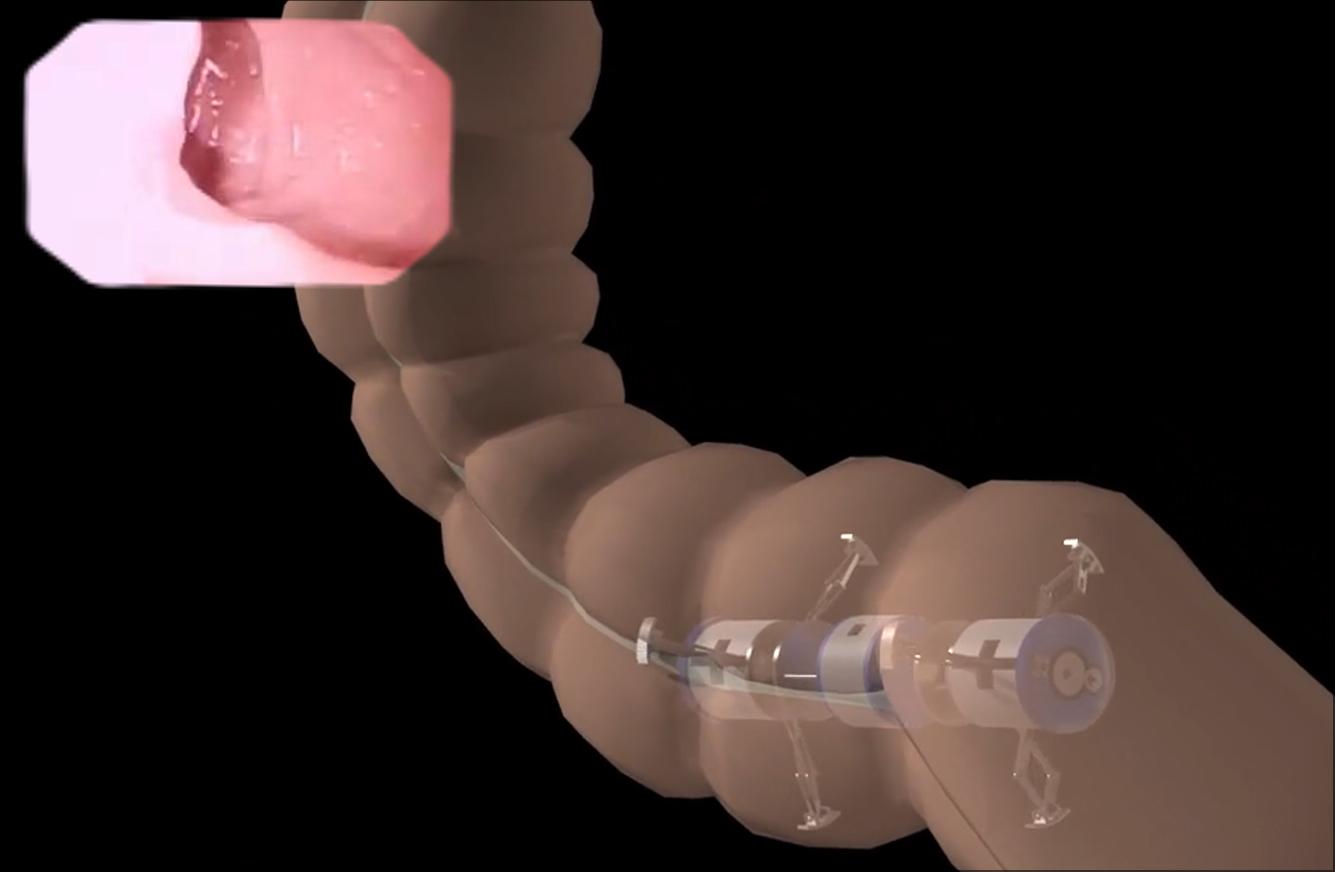
Biomimetic Micro Robot for Intestinal Diagnosis and Treatment
🎯 Highlight: Designed a biomimetic micro robot for intestinal diagnosis and treatment as part of my graduation project at Yanshan University. The robot uses soft materials and micro-actuators to navigate the digestive system. A wireless image transmission program developed in C and an image processing platform based on MATLAB.
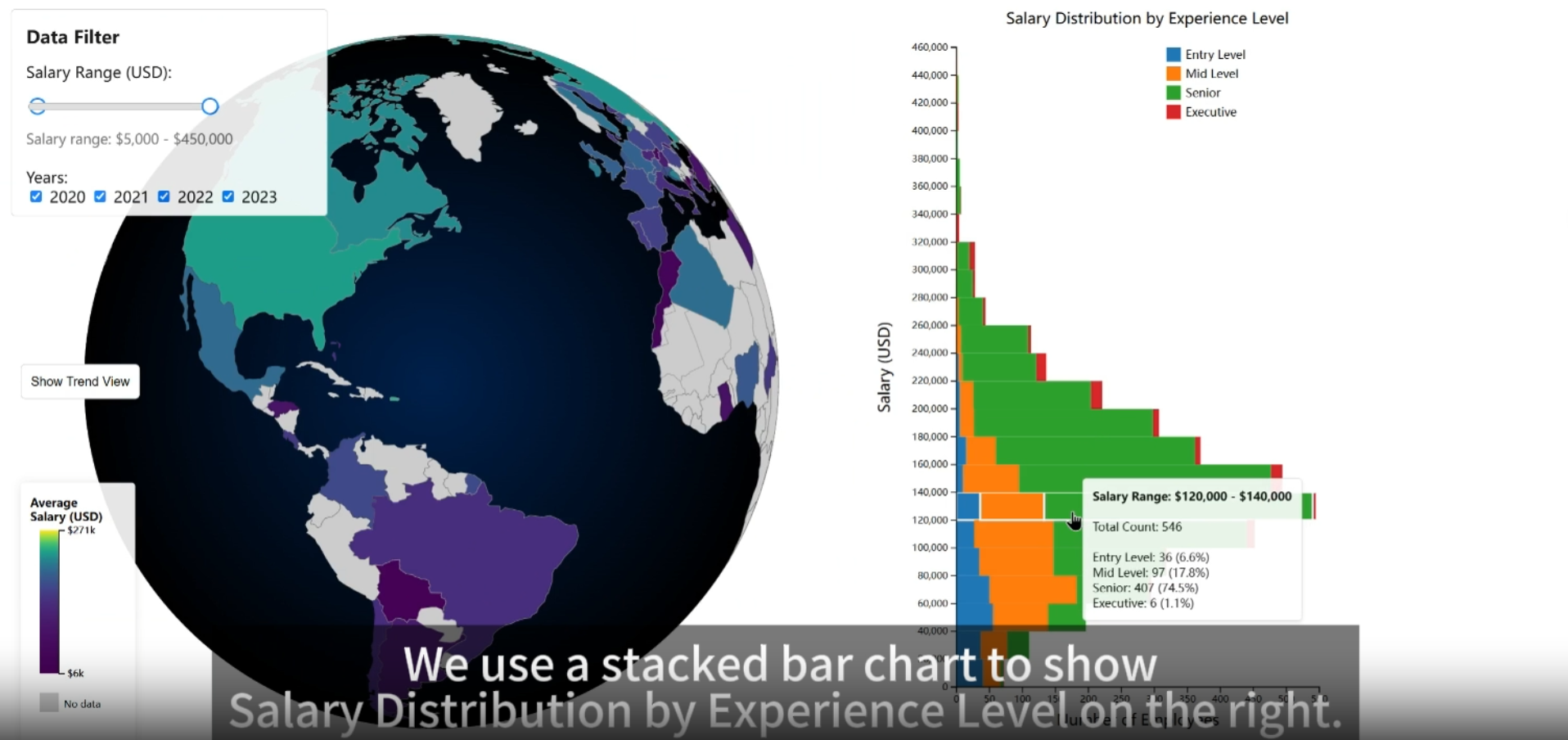
Salary Data Visualization with D3.js
✨ Features:
- Exploring Regional Salary Differences
- Salary-Based Filtering
- Salary Distribution by Experience Level
- Identifying High- and Low-Paying Positions
- Analyzing the Impact of Key Features on Salary
- Analyzing Data Science Salary Trends
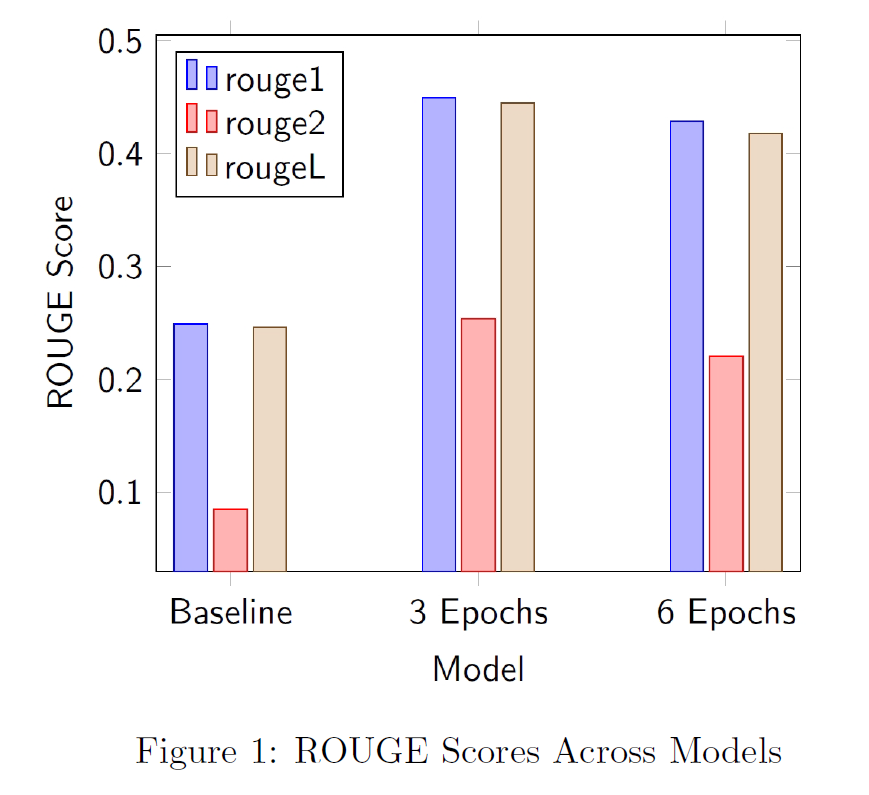
Parameter-efficient Fine-tuning of Small Language Models for Accurate Text Summarization
✨ Features:
- Distilled knowledge from LLM (Qwen2.5-14B) to fine-tune SLM (Qwen2.5-0.5B)
- Computational resource optimization (LoRA + 4-bit quantization)
- Efficient Text Summarization, improving ROUGE score by 80% over baseline
Color-based Target Tracking using MATLAB
✨ Features:
- Real-time tracking
- Target tracking based on PID algorithm
- Accurately track objects in red, green and blue
![]()
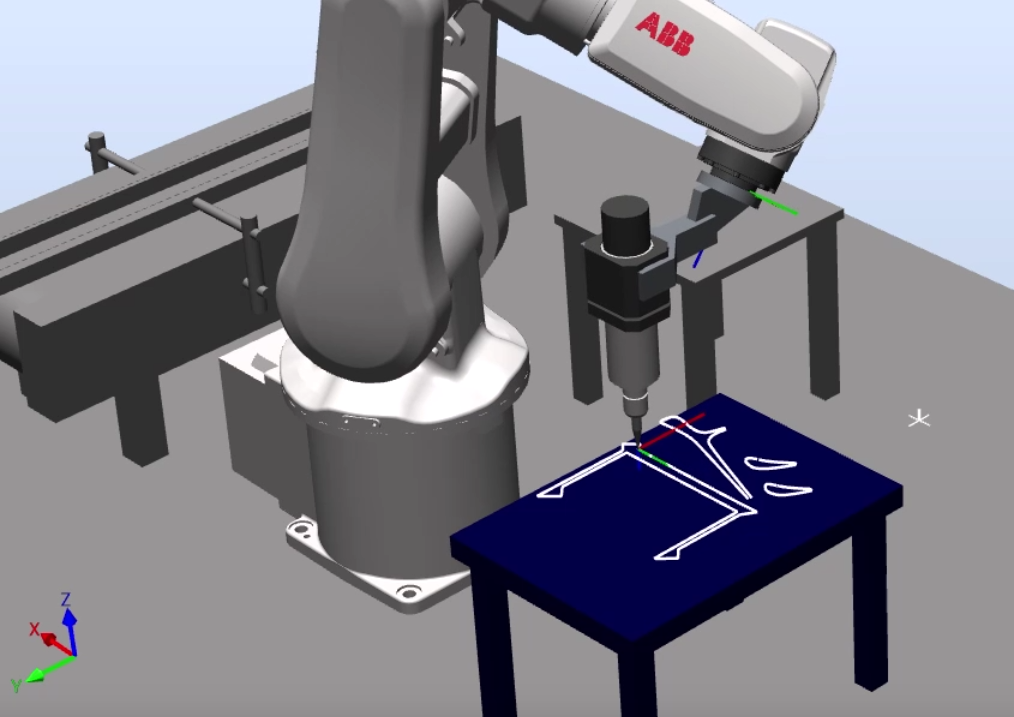
ABB RobotStudio - Writing and Palletizing Simulation
✨ Capabilities:
- Palletizing simulation
- Parts handling automation
- Surface polishing operations
- Precision writing with custom fonts
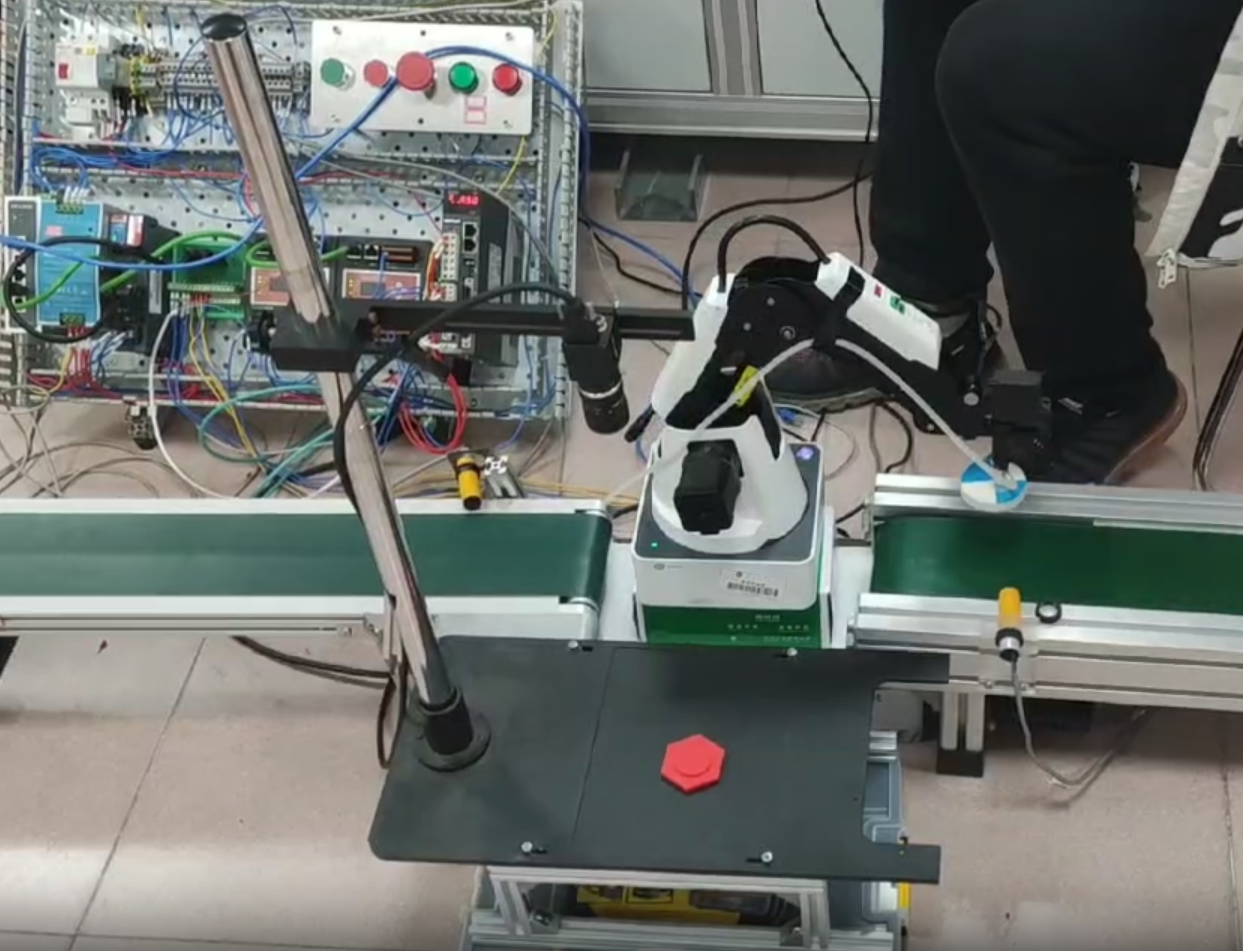
4-DOF Robotic Sorting System Using Vision Camera and TRIO Motion Controller
🎯 Highlight: Low-cost and easy to implement automated sorting system combining computer vision with TRIO motion controllers.
🛠️ Hardware: 4-DOF DOBOT robot • Hikvision industrial camera • TRIO motion controllers (FLEX-6-nano, FLEX 3AX) • Stepper Motor Driver • I/O Modules • Photoelectric switch • Conveyor belts
💻 Software: Motion Perfect • Python IDE • DOBOT Robot Vision Kit
🏭 Dark Factory: This project is part of a fully automated parts assembly factory designed by students of the Robot Engineering program at Yanshan University.
Automatic Line-following and Obstacle Avoidance Robot
✨ Features:
- Automatic line-following mode
- Automatic obstacle avoidance mode
- Easy mode switching via controller buttons
